

محاضرة بجامعة البحرين تناقش نموذجاً جديداً للربوتات المتحركة
الصخير ـ جامعة البحرين
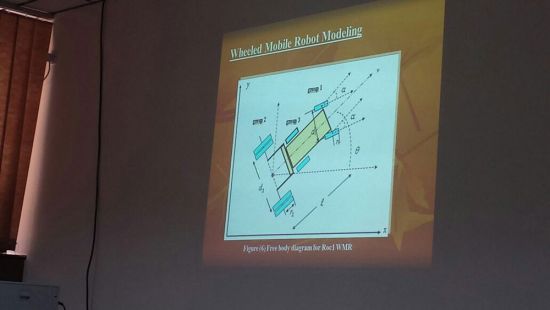
ناقش عضو هيئة التدريس في قسم الهندسة الكهربائية بكلية الهندسة في جامعة البحرين محمد ماجد نهجاً جديداً لتطوير نموذج حركي جديد للروبوتات المتحركة، مقدماً تصميماً وتحليلاً لنموذج الحركة غير الخطية للروبوت المتحرك بعجلات.
جاء ذلك في محاضرة نظمها قسم الهندسة الكهربائية والإلكترونية بالجامعة مؤخراً ضمن سلسلة المحاضرات التي يقيمها القسم بحضور أعضاء هيئة التدريس والطلبة.
وقالت رئيسة القسم سناء المنصوري إن الأستاذ المساعد في القسم محمد ماجد قدم محاضرة علمية بعنوان: الروبوتات الجوالة تحدث فيها عن العجلات التقليدية التي تعد الأكثر استخداما وشيوعاً من بين أنواع الروبوتات المتحركة WMRs، وقام بمقارنتها بتقنية أخرى حديثة مبيناً أن العجلات التقليدية بسيطة التركيب ولا تتطلب الكثير من الصيانة، وتوفر الحركة السلسة، وتقدم سعة حمل كبيرة كما أنها رخيصة الثمن.
وعرض المحاضر – بحسب المنصوري - بحثاً بُني على محاور مهمة في الروبوتات الجوالة، وهي متابعة المسار المحتوي على تعدد المتحسسات، ووحدات التحكم (مسيطرات القيادة الضبابية الذكية) لروبوت العجلات الجوالة.
ويقدم البحث أسلوباً جديداً للرؤية بالحاسوب لبناء نظام قادر على حساب وجود المسار المتبع، وتعقب الأشياء (الأشكال) على المسار، وتمييز أشكال الأشياء إذا كانت بالوضع العمودي أو الأفقي حتى لو كانت في بيئة ديناميكية معقدة.
وأوضح المحاضر – بحسب د. المنصوري - أن آلية استشعار المتحسسات المتعددة معاً (الكاميرا، وأجهزة الاستشعار المغناطيسي وأجهزة استشعار الحركة) مع وحدات التحكم (مسيطرات القيادة الضبابية الذكية) هي الأساس لقدرة الروبوت على تعقب المسار المحدد.
وتوفر النتائج المستحصلة من هذه الطريقة أساساً كافياً للروبوت لأداء مهمة متابعة المسار بنجاح.
وقارن ماجد بين نوعين من وحدات تحكم القيادة، هي: وحدات التحكم التقليدية ووحدات التحكم الذكية (الضبابية متعددة المراحل)، مشيراً إلى أن المقارنة أوضحت أن وحدات التحكم الذكية المقترحة تعلو على وحدة تحكم العمل التقليدية.
وشكرت رئيسة قسم الهندسة الكهربائية والإلكترونية سناء المنصوري المحاضر محمد ماجد، ومنسق برنامج المحاضرات معمر طالب، وجميع الأساتذة والطلبة الذين حضروا الفعالية.